Table of Contents
- See Also
- opals::IOpenness
Aim of module
Provides a raster map of local viewsheds (i.e. openness) based on a DTM grid model.
General description
Openness is a measure introduced by Yokoyama (c.f. references). It is an angular measure denoting the aperture angle of a cone centered at a grid point and constrained by the neighboring elevations within a specified radial distance. It is basically a convexity/concavity measure calculated from local terrain profiles in eight directions of the wind. A distinction is made between positive and negative openness (viewshed above and below the terrain).
Parameter description
Remarks: mandatory
The input grid file is expected in a GDAL supported data format.
Remarks: estimable
Path of openness raster map file in GDAL supported format.
Estimation rule: The current directory and the name (body) of the input file are used as file name basis. Additionally, a postfix and the extension according to the specified output format are constructed (e.g. '_open.tif').
Remarks: estimable
Use GDAL driver names like GTiff, AAIGrid, USGSDEM, SCOP... .
Estimation rule: The output format is estimated based on the extension of the output file (*.tif->GTiff, *.dem->USGSDEM, *.dtm->SCOP...).
Remarks: default=positive
Possible values: positive ... positive openness negative ... negative openness
Openness is defined as positive and negativeOpenness See module docu for further details.
Remarks: default=0
For a specific pixel, the openness is calculated based on local grid profiles in eight directions of the wind. Thus, the resulting openness value can either be calculated as the mean (=0), minimum (=1), or maximum(=2) of all valid openness values (i.e. opening angle of a cone)
Remarks: default=5
Kernel radius
Remarks: optional
If no user defined limits are specified or -limit is even skipped, the entire xy-extents of the input raster model are used.
Remarks: default=9999
Value representing an undefined value in the output raster model
Examples
This example shows how to derive an openness map based on the surface model of demo data set strip21.laz located in the $OPALS_ROOT/demo/ directory. To generate the DSM, please perform the following preprocessing steps:
To calculate the positive openness map, type:
Since no further parameters are specified, the default kernel size (5 pixel radius) is considered and each openness pixel is calculated as the mean value of all 8 profile directions resulting in the GTiff file strip21_pos_open_mean.tif.
To calculate a negative openness map using a kernel radius of 7 pixels for each pixel and using the profile with the minimum opening angle, type:
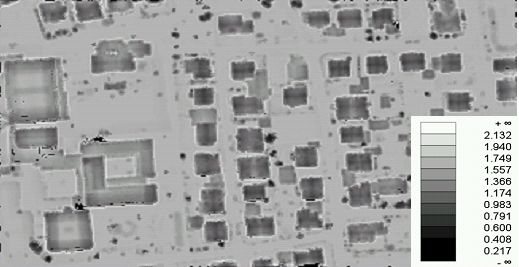
To visualize the resulting map as a grey-tone image, execute:
The following output is produced:
References
Yokoyama, R., M. Shirasawa, and R. J. Pike: Visualizing Topography by Openness: A New Application of Image Processing to Digital Elevation Models, Photogrammetric Engineering and Remote Sensing(68), No. 3, March 2002, pp. 25799866.
G. Mandlburger, M. Vetter, M. Milenkovic, N. Pfeifer: "Derivation of a countrywide river network based on Airborne Laser Scanning DEMs - results of a pilot study"; 19th International Congress on Modelling and Simulation. Perth, Australia; 2011 in: "Modelling and Simulation Society of Australia and New Zealand", (2011), ISBN: 978-0-987214399-7; 2423 - 2429.
