Technische Universität Wien
Orientation and Processing of Airborne Laser Scanning data
Department of Geodesy and Geoinformation - Research Groups Photogrammetry and Remote Sensing
Airborne Laser Scanning delivers not only point positions, but also various point attributes related to the properties of the measured echoes. Additionally, user-generated attributes can also be created, describing texture, structure and radiometric properties of each point and their neighbourhoods. Visual representation of these attributes is essential for effectively using them in point cloud filtering, classification and analysis. Traditional GIS software can visualize rasters and vectors based on their attributes, but point cloud visualization software typically only handle the pre-defined attributes available in the data format they are using (mostly .las). This means other user-generated attributes are not possible to directly visualize through colouring of the points themselves. OpalsColorize exploits the built-in Red, Green, Blue attributes of both the OPALS .odm and the ISPRS .las file for visualization, and allows re-scaling of attribute values to these color attributes, using either pre-defined palettes or RGB visualization.
This use case is based on the data of the Radiometric calibration of full waveform ALS data, Horn, Austria use case. The processing starts with the two .odm files output after the Radiometric Calibration use case is complete. We start with the two .odm files created at the end of the RadioCal Use case. These are two overlapping full-waveform airborne LIDAR flight strips with imported trajectory data, beam vectors, and calibrated reflectance.
First we run OpalsInfo on the two strips to see what attributes they hold
The opalsinfo output is as follows:
Filename c:\Data\opalscolorize_use_case\dev_colorize_use_case\680_110922_095526.odm Type odm SpatialReference PROJCS["WGS 84 / UTM zone 33N",GEOGCS["WGS 84",DATUM["WGS_1984",SPHEROID["WGS 84",6378137,298.257223563,AUTHORITY["EPSG","7030"]],AUTHORITY["EPSG","6326"]],PRIMEM["Greenwich",0,AUTHORITY["EPSG","8901"]],UNIT["degree",0.0174532925199433,AUTHORITY["EPSG","9122"]],AUTHORITY["EPSG","4326"]],PROJECTION["Transverse_Mercator"],PARAMETER["latitude_of_origin",0],PARAMETER["central_meridian",15],PARAMETER["scale_factor",0.9996],PARAMETER["false_easting",500000],PARAMETER["false_northing",0],UNIT["metre",1,AUTHORITY["EPSG","9001"]],AXIS["Easting",EAST],AXIS["Northing",NORTH],AUTHORITY["EPSG","32633"]] Point Count 1095464 Line Count 0 Polygon Count 0 Minimum X-Y-Z 548355.271 5389534.000 321.017 Maximum X-Y-Z 548701.000 5390034.000 415.035 Point density 0.61 Attribute type count min max mean sigma Amplitude float 1095464 10.000 23874.000 133.781 81.664 EchoNumber uint8 1095464 1 7 1.210 0.530 NrOfEchos uint8 1095464 1 7 1.419 0.765 ClassificationFlags uint8 1095464 0 0 0.000 0.000 ScanDirection bool 1095464 0 0 0.000 0.000 EdgeOfFlightLine bool 1095464 0 0 0.000 0.000 Classification uint8 1095464 0 0 0.000 0.000 ScanAngle float 1095464 0.022 0.557 0.328 0.133 UserData uint8 1095464 0 0 0.000 0.000 PointSourceId uint16 1095464 0 0 0.000 0.000 GPSTime double 1095464 381375.874 381385.716 381380.482 2.407 EchoWidth float 1095464 3.000 26.700 4.618 0.650 BeamVectorX float 1095464 -388.474 7.684 -187.519 86.269 BeamVectorY float 1095464 -142.926 -23.125 -74.467 24.795 BeamVectorZ float 1095464 -598.542 -507.674 -559.442 5.714 _BeamVectorSCSX float 1095464 -1.214 1.076 -0.120 0.525 _BeamVectorSCSY float 1095464 12.581 343.868 195.275 85.006 _BeamVectorSCSZ float 1095464 516.645 595.460 562.435 11.292 Range float 1095464 526.293 695.386 600.629 31.914 Id int64 1095464 6442450944 1125919234205058 649683261817435.370 379675618954346.500 FileId uint16 1095464 1 1 1.000 0.000 LayerId uint16 1095464 0 0 0.000 0.000 WinputCode uint16 1095464 30 30 30.000 0.000 StructNr uint16 1095464 0 0 0.000 0.000 NormalX float 918990 -1.000 1.000 0.060 0.403 NormalY float 918990 -1.000 1.000 0.028 0.411 NormalZ float 918990 0.000 1.000 0.698 0.421 NormalSigma0 float 918990 0.000 0.994 0.079 0.100 NormalEstimationMethod uint8 918990 0 0 0.000 0.000 CrossSection float 0 --- --- --- --- _IncidenceAngle float 1095464 0.000 84.999 13.383 15.064 Reflectance float 1095464 0.012 56.456 0.318 0.260 _Gamma float 1095464 0.048 225.826 1.129 0.699 _Sigma float 0 --- --- --- --- Index statistics geometries dim type depth node count leaf count tile size min #owl max #owl mean #owl stddev #owl Points 2 tile 1 25 21 107.250 1361 106195 52164.952 36028.082
So the file has approximately 1000000 points with
Theoretically, all the numeric attributes can be visualized using OpalsColorize on a point basis.
We run OpalsInfo on the other file as well:
The output is the same, but with approximately 2000000 points.
Filename c:\Data\opalscolorize_use_case\dev_colorize_use_case\680_110922_095947.odm Type odm SpatialReference PROJCS["WGS 84 / UTM zone 33N",GEOGCS["WGS 84",DATUM["WGS_1984",SPHEROID["WGS 84",6378137,298.257223563,AUTHORITY["EPSG","7030"]],AUTHORITY["EPSG","6326"]],PRIMEM["Greenwich",0,AUTHORITY["EPSG","8901"]],UNIT["degree",0.0174532925199433,AUTHORITY["EPSG","9122"]],AUTHORITY["EPSG","4326"]],PROJECTION["Transverse_Mercator"],PARAMETER["latitude_of_origin",0],PARAMETER["central_meridian",15],PARAMETER["scale_factor",0.9996],PARAMETER["false_easting",500000],PARAMETER["false_northing",0],UNIT["metre",1,AUTHORITY["EPSG","9001"]],AXIS["Easting",EAST],AXIS["Northing",NORTH],AUTHORITY["EPSG","32633"]] Point Count 2000660 Line Count 0 Polygon Count 0 Minimum X-Y-Z 548201.001 5389534.000 319.819 Maximum X-Y-Z 548701.000 5390034.000 420.567 Point density 0.56 Attribute type count min max mean sigma Amplitude float 2000660 10.000 65517.000 172.725 119.138 EchoNumber uint8 2000660 1 7 1.158 0.455 NrOfEchos uint8 2000660 1 7 1.318 0.664 ClassificationFlags uint8 2000660 0 0 0.000 0.000 ScanDirection bool 2000660 0 0 0.000 0.000 EdgeOfFlightLine bool 2000660 0 0 0.000 0.000 Classification uint8 2000660 0 0 0.000 0.000 ScanAngle float 2000660 -0.522 0.558 0.040 0.251 UserData uint8 2000660 0 0 0.000 0.000 PointSourceId uint16 2000660 0 0 0.000 0.000 GPSTime double 2000660 381607.216 381618.474 381613.123 2.403 EchoWidth float 2000660 1.600 28.000 4.642 0.608 BeamVectorX float 2000660 -281.645 298.890 15.565 127.223 BeamVectorY float 2000660 -138.602 164.437 17.263 62.536 BeamVectorZ float 2000660 -583.272 -484.437 -544.106 4.923 _BeamVectorSCSX float 2000660 -1.136 3.138 0.933 0.904 _BeamVectorSCSY float 2000660 -313.871 342.940 22.844 142.387 _BeamVectorSCSZ float 2000660 484.980 585.881 543.968 5.719 Range float 2000660 485.176 648.505 562.468 18.485 Id int64 2000660 2147483648 1125919234260358 636357768932269.250 339547697230284.690 FileId uint16 2000660 1 1 1.000 0.000 LayerId uint16 2000660 0 0 0.000 0.000 WinputCode uint16 2000660 30 30 30.000 0.000 StructNr uint16 2000660 0 0 0.000 0.000 NormalX float 1745996 -1.000 1.000 -0.001 0.376 NormalY float 1745996 -1.000 1.000 0.005 0.370 NormalZ float 1745996 0.000 1.000 0.761 0.378 NormalSigma0 float 1745996 0.000 1.266 0.072 0.096 NormalEstimationMethod uint8 1745996 0 0 0.000 0.000 CrossSection float 0 --- --- --- --- _IncidenceAngle float 2000660 0.000 84.999 9.830 12.065 Reflectance float 2000660 0.012 146.687 0.334 0.245 _Gamma float 2000660 0.050 586.747 1.268 0.892 _Sigma float 0 --- --- --- --- Index statistics geometries dim type depth node count leaf count tile size min #owl max #owl mean #owl stddev #owl Points 2 tile 1 25 25 128.000 4851 139210 80026.400 46672.537
We merge the two files to one single data file for easier handling, by importing the two .odms to a single .odm
In this case, OpalsImport retains all the attributes of the two source files. We check this in OpalsInfo:
The result is as follows:
Filename c:\Data\opalscolorize_use_case\dev_colorize_use_case\points.odm Type odm SpatialReference PROJCS["WGS 84 / UTM zone 33N",GEOGCS["WGS 84",DATUM["WGS_1984",SPHEROID["WGS 84",6378137,298.257223563,AUTHORITY["EPSG","7030"]],AUTHORITY["EPSG","6326"]],PRIMEM["Greenwich",0,AUTHORITY["EPSG","8901"]],UNIT["degree",0.0174532925199433,AUTHORITY["EPSG","9122"]],AUTHORITY["EPSG","4326"]],PROJECTION["Transverse_Mercator"],PARAMETER["latitude_of_origin",0],PARAMETER["central_meridian",15],PARAMETER["scale_factor",0.9996],PARAMETER["false_easting",500000],PARAMETER["false_northing",0],UNIT["metre",1,AUTHORITY["EPSG","9001"]],AXIS["Easting",EAST],AXIS["Northing",NORTH],AUTHORITY["EPSG","32633"]] Point Count 3096124 Line Count 0 Polygon Count 0 Minimum X-Y-Z 548201.001 5389534.000 319.819 Maximum X-Y-Z 548701.000 5390034.000 420.567 Point density 1.15 Attribute type count min max mean sigma Amplitude float 3096124 10.000 65517.000 158.946 108.987 EchoNumber uint8 3096124 1 7 1.176 0.483 NrOfEchos uint8 3096124 1 7 1.354 0.703 ClassificationFlags uint8 3096124 0 0 0.000 0.000 ScanDirection bool 3096124 0 0 0.000 0.000 EdgeOfFlightLine bool 3096124 0 0 0.000 0.000 Classification uint8 3096124 0 0 0.000 0.000 ScanAngle float 3096124 -0.522 0.558 0.142 0.257 UserData uint8 3096124 0 0 0.000 0.000 PointSourceId uint16 3096124 0 0 0.000 0.000 GPSTime double 3096124 381375.874 381618.474 381530.811 111.264 EchoWidth float 3096124 1.600 28.000 4.634 0.624 BeamVectorX float 3096124 -388.474 298.890 -56.290 150.072 BeamVectorY float 3096124 -142.926 164.437 -15.193 68.325 BeamVectorZ float 3096124 -598.542 -484.437 -549.532 8.999 _BeamVectorSCSX float 3096124 -1.214 3.138 0.560 0.938 _BeamVectorSCSY float 3096124 -313.871 367.928 83.854 149.850 _BeamVectorSCSZ float 3096124 484.980 595.460 550.502 12.009 Range float 3096124 485.176 695.386 575.970 30.234 Id int64 3096124 2147483648 1407372736120332 642031292303116.750 360738370783687.810 FileId uint16 3096124 1 2 1.646 0.478 LayerId uint16 3096124 0 0 0.000 0.000 WinputCode uint16 3096124 30 30 30.000 0.000 StructNr uint16 3096124 0 0 0.000 0.000 NormalX float 2664986 -1.000 1.000 0.020 0.386 NormalY float 2664986 -1.000 1.000 0.013 0.385 NormalZ float 2664986 0.000 1.000 0.739 0.394 NormalSigma0 float 2664986 0.000 1.142 0.074 0.097 NormalEstimationMethod uint8 2664986 0 0 0.000 0.000 CrossSection float 0 --- --- --- --- _IncidenceAngle float 3096124 0.000 84.999 11.087 13.313 Reflectance float 3096124 0.012 146.687 0.328 0.250 _Gamma float 3096124 0.048 586.747 1.219 0.832 _Sigma float 0 --- --- --- --- Index statistics geometries dim type depth node count leaf count tile size min #owl max #owl mean #owl stddev #owl Points 2 tile 1 25 25 125.500 13756 287781 123844.960 79551.495
This file now has about 3100000 points, with all the original attributes. The attribute FileId refers to the original source files, and is "1" and "2" respectively. We can check this using a basic OpalsColorize command:
OpalsColorize edits the Red, Green and Blue attributes of an .odm file to create colour outputs based on the values of other attributes. This means that the selected attribute values are rescaled to match the range of the RGB attribute. The default case is that only an .odm is generated, with new attributes. However, if additionally an output .las file is specified, then such a file is also generated, with the color written to the R,G,B attributes of the .las file. For this command, OpalsColorize gives the following output
16:35:13 info: Running opalsColorize ...
16:35:13 info: Index statistics
geometries dim type depth node count leaf count
tile size
min #owl max #owl mean #owl stddev #owl
Points 2 tile 1 25 25 125.500 13756 287781
123844.960
79551.495
16:35:13 info: Stage 1/1: Classifying data
100%16:35:24 info: Class No. FileId : Count
0 BG : 0
1 underfl : 0
2 1.000 : 1095464
3 1.004 : 0
4 1.008 : 0
...
... 253 1.992 : 0 254 1.996 : 0 255 2.000 : 2000660 16:35:24 info: Running opalsColorize took: 00:00:11
This means that we are using the default palette with 255 colour steps, which is $OPALS_ROOT$/addons/pal/standardPal.xml . This palette runs from green to brown, in our case this means that points with FileId == 1 will be coloured green, while points with FileId == 2 will be coloured brown. By opening the resulting .las point cloud in a point cloud viewer (eg. FugroViewer, CloudCompare), the output point cloud can be checked visually in planar, profile or 3D perspective view.

Additionally, a basic .svg graphic file legend is generated with attribute values and their respective colouring.
The Echo width values have the following distribution (from the OpalsInfo output):
EchoWidth float 3096124 1.600 28.000 4.634 0.624
What if we want a different color scheme? We apply a different palette from the folder $OPALS_ROOT$/addons/pal/ or our own user-defined .xml palette files. E.g.
this will result in points with FileId == 1 coloured red, and points with FileId == 2 coloured blue. Please note that applying OpalsColorize on the same output file repeatedly will overwrite the Red, Green and Blue values in the file.
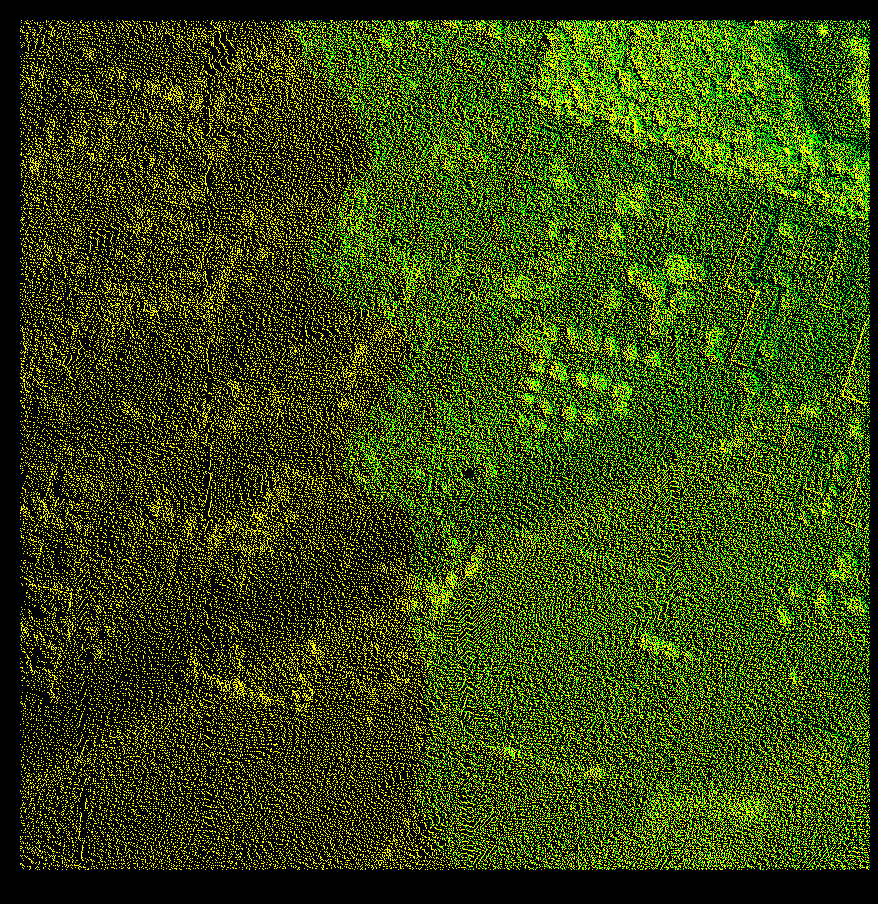
Now we visualize another point attribute: Echo Width.
In this case the minimum and maximum value range of Echo Width are automatically mapped to the palette nodes with a linear stretch. The minimum is 0, the maximum is 28, and the resulting legend can be viewed as the file points_EchoWidth_EchoWidth_Legend.svg. However, this visualization is not informative as nearly all points have very similar shades of green. In order to get a better overview of the EchoWidth distribution, a linear scaling can be applied, excluding points above and below a certain limit, e.g. 1 Sigma from the mean. This is 4.636 ± 0.624, so 4 and 5.5 are reasonable limits that we can expect to contain most of the data. These can be applied to coloring with the -ScalePal parameter. Here we use another palette in order to get a wider colour range:
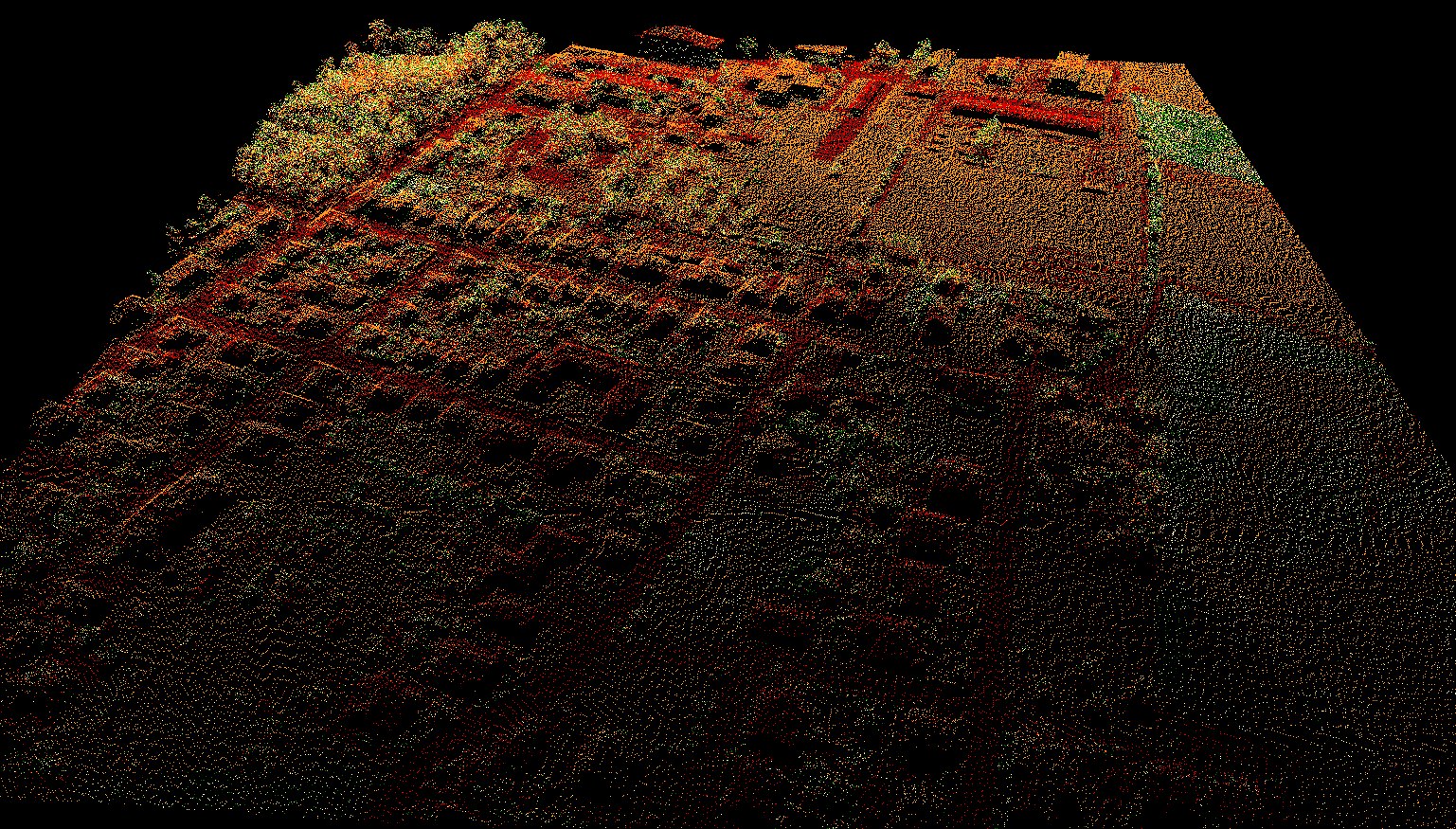
This results in low echo width points becoming red, medium echo width points orange, and high echo width points green. A more detailed visualization can be achieved by setting a higher number of classes using the parameter -nclasses
Or even better, steps in the palette can be introduced manually, eg. to enhance specific intervals. For this, we first calculate a histogram of Echo Width, within the already established upper and lower limits, to avoid outliers.
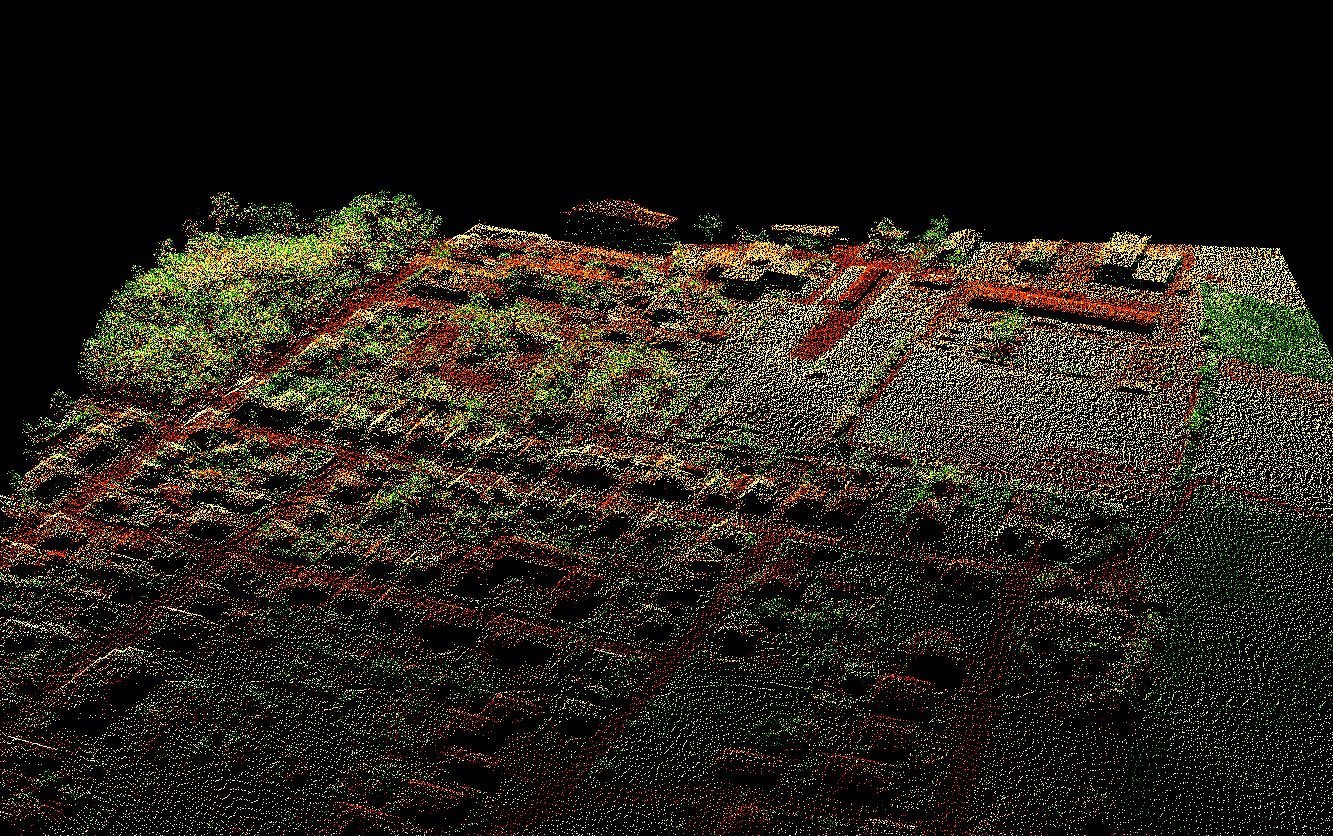
Based on the histogram, we use the following intervals: 4,4.1,4.2,4.5,4.7,5,5.5,6 . We enter these steps into the Scalepal parameter as before
On this .las dataset the colours of the palette correspond exactly to the specified intervals and therefore allow quantitative interpretation of echo width. Alternatively, histogram equalization can be used for generating a visually more appealing output that enhances the heterogeneity of the data
Normalized height is another important attribute for point-level visualization. For calculating normalized height, first we generate a very basic Digital Terrain Model (DTM) by taking the second lowest point in every 5 m cell, then smoothing with a minimum filter
Then we use this grid to calculate normalized height as a new attribute, and check its typical values with opalshisto
NormalizedZ varies between 0 and 25 m, with a some rare points having negative values. We visualize NormalizedZ with opalsColorize, choosing a palette that is intuitive for height
This output is colorized to intervals, with stepwise colour changes

It is possible to use the same colour palette and sample range, but specified quantitative steps

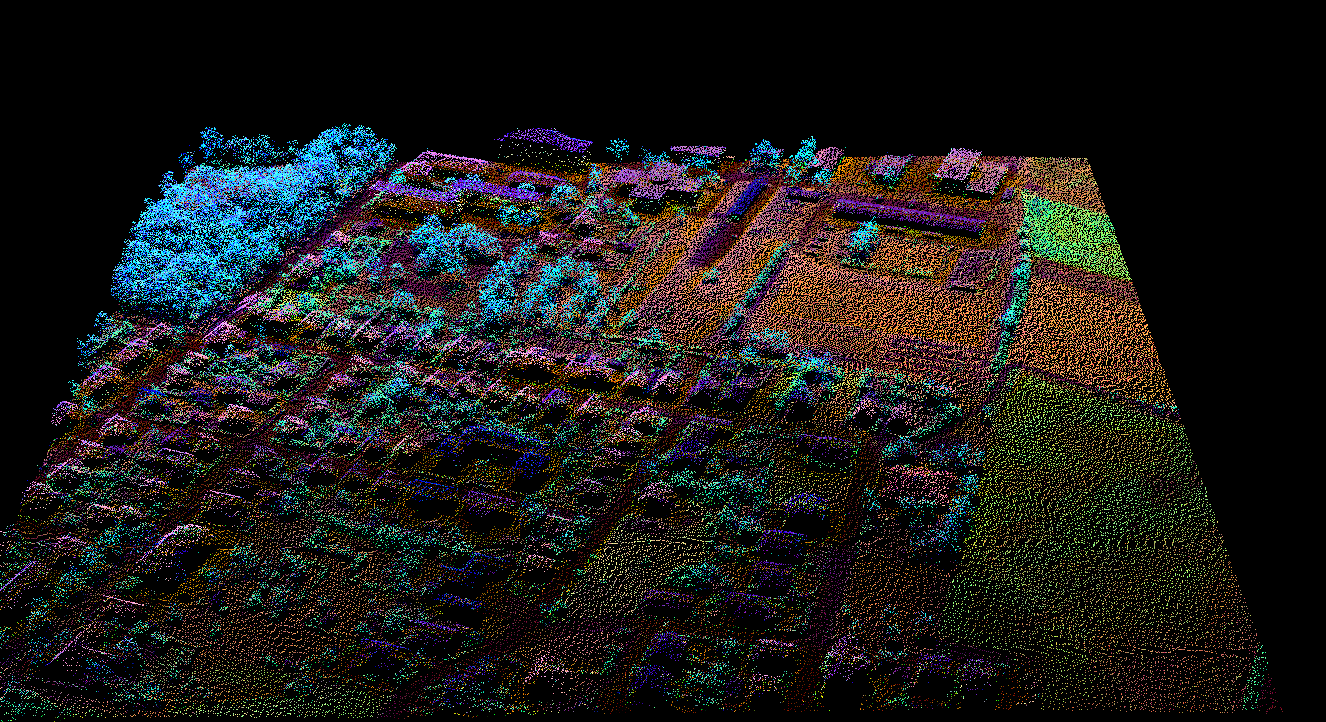
Finally, OpalsColorize allows comparison of three different attributes simultaneously, rescaling their values to the red, green and blue colour channels of the output respectively. The most popular combination of three attributes for full-waveform LIDAR is Reflectance --> Red, EchoWidth --> Green and NormalizedZ --> Blue, as this gives an intuitive output with green vegetation, red terrain and blue high points. If 3 attributes are specified in OpalsColorize, they are colored according to their order Red, Green, and Blue. Histogram equalization is essential, since the three variables have very different value ranges. Please note that no palette is specified: the colour scheme is produced by the mixing of the RGB channels. Three legend files are produced, one for each attribute
The output dataset can be used for understanding the connections between the different attributes and as a basis for selecting attributes for point cloud classification.
A. Zlinszky, A. Schroiff, J. Otepka, G. Mandlburger, N. Pfeifer "Simultaneous colour visualizations of multiple ALS point cloud attributes for land cover and vegetation analysis"; European Geosciences Union, General Assembly 2014 (EGU 2014), Wien. Full paper
 1.8.17
1.8.17